
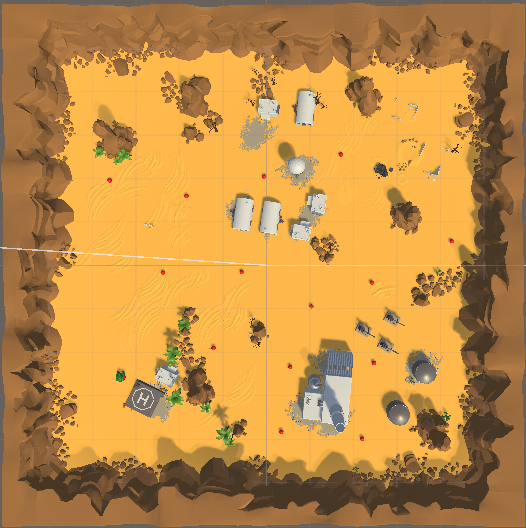
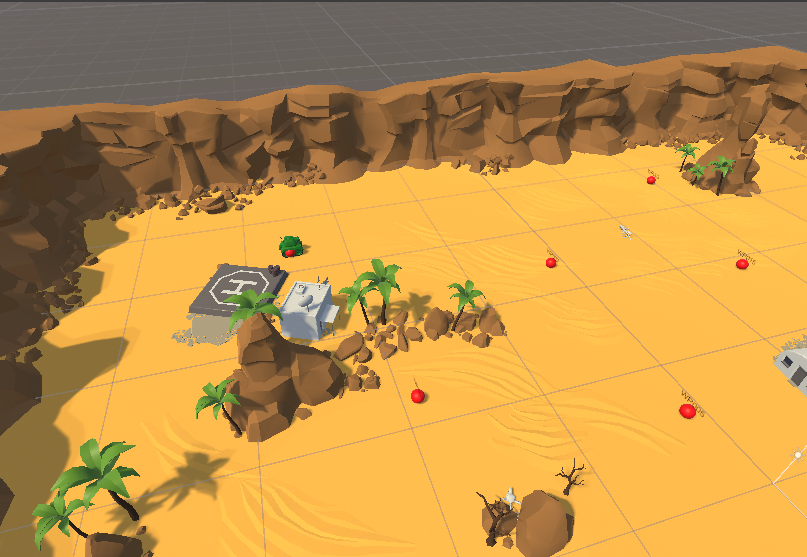
This project demonstrates the implementation of the A* pathfinding algorithm using waypoints to simulate roads. The waypoints form a graph, and the tank navigates through the terrain to reach a user-defined endpoint by following the shortest path calculated by the A* algorithm.
This project demonstrates the application of the A* pathfinding algorithm using waypoints to simulate roads for a tank navigating a terrain. It showcases both the algorithm’s efficiency and the ability to dynamically change the destination points, providing an interactive and visual experience.
Core Features
- Waypoint Graph Setup: Defines nodes (waypoints) and edges (connections) to create a graph structure representing roads.
- A Pathfinding Algorithm*: Implements the A* algorithm to find the shortest path between nodes in the graph.
- Real-Time Navigation: The tank dynamically follows the calculated path to reach the user-defined endpoint.
- Interactive Controls: Users can set different destination points for the tank using buttons.
1. Graph Structure (Graph.cs)
This script manages the graph of nodes and edges, and implements the A* algorithm to find the shortest path.
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Graph
{
private List<Edge> edges = new List<Edge>();
private List<Node> nodes = new List<Node>();
public List<Node> pathList = new List<Node>();
public Graph() { }
public void AddNode(GameObject _id)
{
Node node = new Node(_id);
nodes.Add(node);
}
public void AddEdge(GameObject fromNode, GameObject toNode)
{
Node from = FindNode(fromNode);
Node to = FindNode(toNode);
if (from != null && to != null)
{
Edge e = new Edge(from, to);
edges.Add(e);
from.edgeList.Add(e);
}
}
Node FindNode(GameObject _id)
{
foreach (Node n in nodes)
{
if (n.GetID() == _id) return n;
}
return null;
}
public bool AStar(GameObject startID, GameObject endID)
{
if (startID == endID)
{
pathList.Clear();
return false;
}
Node start = FindNode(startID);
Node end = FindNode(endID);
if (start == null || end == null) return false;
List<Node> open = new List<Node>();
List<Node> closed = new List<Node>();
float tentativeGSscore = 0;
bool tentativeIsBetter;
start.g = 0;
start.h = distance(start, end);
start.f = start.h;
open.Add(start);
while (open.Count > 0)
{
int i = LowestCost(open);
Node thisNode = open[i];
if (thisNode.GetID() == endID)
{
ReconstructPath(start, end);
return true;
}
open.RemoveAt(i);
closed.Add(thisNode);
Node neighbour;
foreach (Edge e in thisNode.edgeList)
{
neighbour = e.endNode;
if (closed.IndexOf(neighbour) > -1) continue;
tentativeGSscore = thisNode.g + distance(thisNode, neighbour);
if (open.IndexOf(neighbour) == -1)
{
open.Add(neighbour);
tentativeIsBetter = true;
}
else if (tentativeGSscore < neighbour.g)
{
tentativeIsBetter = true;
}
else tentativeIsBetter = false;
if (tentativeIsBetter)
{
neighbour.cameFrom = thisNode;
neighbour.g = tentativeGSscore;
neighbour.h = distance(thisNode, end);
neighbour.f = neighbour.g + neighbour.h;
}
}
}
return false;
}
public void ReconstructPath(Node startID, Node endID)
{
pathList.Clear();
pathList.Add(endID);
var p = endID.cameFrom;
while (p != startID && p != null)
{
pathList.Insert(0, p);
p = p.cameFrom;
}
pathList.Insert(0, startID);
}
float distance(Node a, Node b)
{
return (Vector3.SqrMagnitude(a.GetID().transform.position - b.GetID().transform.position));
}
int LowestCost(List<Node> l)
{
float lowestCost = 0;
int count = 0;
int iteratorCount = 0;
lowestCost = l[0].f;
for (int i = 1; i < l.Count; i++)
{
if (l[i].f < lowestCost)
{
lowestCost = l[i].f;
iteratorCount = count;
}
count++;
}
return iteratorCount;
}
}2. Node Definition (Node.cs)
This script defines the node structure, representing each waypoint in the graph.
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Node
{
public List<Edge> edgeList = new List<Edge>();
public Node path = null;
private GameObject id;
public float x, y, z;
public float f, g, h;
public Node cameFrom;
public Node(GameObject i)
{
id = i;
x = i.transform.position.x;
y = i.transform.position.y;
z = i.transform.position.z;
}
public GameObject GetID()
{
return id;
}
}3. Edge Definition (Edge.cs)
This script defines the edges connecting nodes in the graph.
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Edge
{
public Node startNode;
public Node endNode;
public Edge(Node from, Node to)
{
startNode = from;
endNode = to;
}
}4. Waypoint Manager (WPManager.cs)
This script sets up the waypoints and links, initializing the graph for pathfinding.
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
[System.Serializable]
public struct Link
{
public enum direction { UNI, BI }
public GameObject node1;
public GameObject node2;
public direction dir;
}
public class WPManager : MonoBehaviour
{
public GameObject[] waypoints;
public Link[] links;
public Graph graph = new Graph();
// Start is called before the first frame update
void Start()
{
if (waypoints.Length > 0)
{
foreach (GameObject wp in waypoints)
{
graph.AddNode(wp);
}
foreach (Link l in links)
{
graph.AddEdge(l.node1, l.node2);
if (l.dir == Link.direction.BI)
{
graph.AddEdge(l.node2, l.node1);
}
}
}
}
}5. Tank Navigation (FollowWP.cs)
This script handles the tank’s movement along the path calculated by the A* algorithm, allowing the user to set different destination points.
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class FollowWP : MonoBehaviour
{
private Transform goal;
public float speed;
public float accuracy;
public float rotSpeed;
public GameObject wpManager;
private GameObject[] waypoints;
private GameObject currentNode;
private int currentWP = 0;
private Graph g;
// Start is called before the first frame update
void Start()
{
waypoints = wpManager.GetComponent<WPManager>().waypoints;
g = wpManager.GetComponent<WPManager>().graph;
currentNode = waypoints[0]; // de acolo incepe ca pe nodu ala se afla tanku
}
public void GoToHeli()
{
g.AStar(currentNode, waypoints[0]);
currentWP = 0;
}
public void GoToRuin()
{
g.AStar(currentNode, waypoints[11]);
currentWP = 0;
}
public void GoToFactory()
{
g.AStar(currentNode, waypoints[10]);
currentWP = 0;
}
public void GoToHangar()
{
g.AStar(currentNode, waypoints[3]);
currentWP = 0;
}
// Update is called once per frame
void LateUpdate()
{
if (g.pathList.Count == 0 || currentWP == g.pathList.Count) return;
if (Vector3.Distance(g.pathList[currentWP].GetID().transform.position, this.transform.position) < accuracy)
{
currentNode = g.pathList[currentWP].GetID();
currentWP++;
}
if (currentWP < g.pathList.Count)
{
goal = g.pathList[currentWP].GetID().transform;
Vector3 lookAtGoal = new Vector3(goal.position.x, this.transform.position.y, goal.position.z);
Vector3 direction = lookAtGoal - this.transform.position;
this.transform.rotation = Quaternion.Slerp(this.transform.rotation, Quaternion.LookRotation(direction), rotSpeed * Time.deltaTime);
this.transform.Translate(0, 0, speed * Time.deltaTime) ;
}
}
}
Leave a Reply